HashMap源码阅读笔记
HashMap源码阅读笔记
本文在此博客的内容上进行了部分修改,旨在加深笔者对HashMap的理解,暂不讨论红黑树相关逻辑
概述
HashMap作为经常使用到的类,大多时候都是只知道大概原理,比如底层是由数组+链表+红黑树实现,使用HashMap存储自定义类时需要重写其hashCode和equals方法等等……但对其具体如何实现却知之甚少,本文将作为类似笔记的形式记录笔者的源码阅读方式。(在JDK 1.7及其之前由数组加链表组成,正常情况想我们谈论的均为JDK 1.8及其之后的HashMap。需要注意的是HashMap非线程安全,在多线程下可能会引发多线程问题)
构造方法分析
HashMap 的构造方法不多,只有四个。HashMap 构造方法做的事情比较简单,一般都是初始化一些重要变量,比如 loadFactor 和 threshold。而底层的数据结构则是延迟到插入键值对时再进行初始化。HashMap 相关构造方法如下:
第二个方法调用了第三个方法,一般来说前两个方法用的是比较多的,至于负载因子(loadFactor)一般使用默认的0.75就行。构造方法主要是进行一些参数的设置,下面说说初始化的这些参数。
初始容量,负载因子,阈值
我们在一般情况下,都会使用无参构造方法创建 HashMap。但当我们对时间和空间复杂度有要求的时候,使用默认值有时可能达不到我们的要求,这个时候我们就需要手动调参。在 HashMap 构造方法中,可供我们调整的参数有两个,一个是初始容量 initialCapacity,另一个负载因子 loadFactor。通过这两个设定这两个参数,可以进一步影响阈值大小。但初始阈值 threshold 仅由 initialCapacity 经过移位操作计算得出。他们的作用分别如下:
| 名称 | 用途 |
|---|---|
| initialCapacity | HashMap 初始容量 |
| loadFactor | 负载因子 |
| threshold | 当前 HashMap 所能容纳键值对数量的最大值,超过这个值,则需扩容 |
先介绍几个常量值:
在上面的代码中使用了位运算:<<,位运算是直接操作二进制位,<<代表向左移动,这里只需要知道左移一位:a << 1等价于a * 2就行了(右移一位等价于除以2)。代码中并没有定义初始容量initialCapacity这个变量,因为initialCapacity只使用一次,并且可以被threshold暂时代替(下面会有讲到),因此并没有必要浪费空间存储该值。
默认情况下HashMap容量为16,负载因子0.75,这里并没有默认阈值,原因是阈值可由容量乘上负载因子计算而来(注释中有说明),即threshold = capacity * loadFactor。但当你仔细看构造方法3时,会发现阈值并不是由上面公式计算而来,而是通过一个方法算出来的。我们来看看初始化 threshold 的方法长什么样的的,源码如下:
上面的代码不太好理解,使用了无符号右移>>>和或|运算。具体位运算如何使用请百度,本文不再赘述。该段代码的作用是找到大于或等于 cap 的最小2的幂。可以通过以下运算看出端倪:
输出结果:
100000000000000000000000000001
100000000000000000000000000000
110000000000000000000000000000
111100000000000000000000000000
111111110000000000000000000000
111111111111111100000000000000
111111111111111111111111111111
1000000000000000000000000000000这里放一张图解: 
说完了初始阈值的计算过程,再来说说负载因子(loadFactor)。对于 HashMap 来说,负载因子是一个很重要的参数,该参数反应了 HashMap 桶数组的使用情况(假设键值对节点均匀分布在桶数组中)。通过调节负载因子,可使 HashMap 时间和空间复杂度上有不同的表现。当我们调低负载因子时,HashMap 所能容纳的键值对数量变少。扩容时,重新将键值对存储新的桶数组里,键的键之间产生的碰撞会下降,链表长度变短。此时,HashMap 的增删改查等操作的效率将会变高,这里是典型的拿空间换时间。相反,如果增加负载因子(负载因子可以大于1),HashMap 所能容纳的键值对数量变多,空间利用率高,但碰撞率也高。这意味着链表长度变长,效率也随之降低,这种情况是拿时间换空间。至于负载因子怎么调节,这个看使用场景了。一般情况下,我们用默认值就可以了。
查找
首先要知道内部的Node这个类,链表、二叉树一般都是使用类似这种的类,没什么好说的。
查找操作就是利用HashMap的原理:
- 找到元素所在桶
- 如果桶内是红黑树则调用红黑树的查找方法
- 如果桶内是链表则直接遍历
上面,定位桶所在的位置关键在这一步:
这里,在n为2的幂次方的时候,(n - 1) & hash等价于hash % n但是效率更高。举个例子hash = 185,n = 16,计算过程如下:  & hash")
正好可以获取到hash对n的模。这里正好解释了为什么容量必须是2的幂次方。网上好多人说容量不是2的幂次方之后,是因为(n - 1) & hash这么运算所得的值会冲突,并且会导致有些桶不能放元素了。但笔者不这么认为,因为假如容量不是2的幂次方之后,肯定不能使用(n - 1) & hash这种运算方式了,只能使用模运算%,这样就会导致效率低好多。所以空间必须是2的幂次方之后才能(n - 1) & hash这么运算,最终得到效率上的提升。
但是上面的hash并非key的hashCode方法,而是HashMap的静态方法:
这样做有两个好处,首先看一下上面求余的计算图,图中的 hash 是由键的 hashCode 产生。计算余数时,由于 n 比较小,hash 只有低4位参与了计算,高位的计算可以认为是无效的。这样导致了计算结果只与低位信息有关,高位数据没发挥作用。为了处理这个缺陷,我们可以上图中的 hash 高4位数据与低4位数据进行异或运算,即 hash ^ (hash >>> 4)。通过这种方式,让高位数据与低位数据进行异或,以此加大低位信息的随机性,变相的让高位数据参与到计算中。此时的计算过程如下:
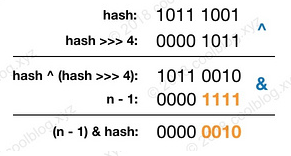
在 Java 中,hashCode 方法产生的 hash 是 int 类型,32 位宽。前16位为高位,后16位为低位,所以要右移16位。
上面所说的是重新计算 hash 的一个好处,除此之外,重新计算 hash 的另一个好处是可以增加 hash 的复杂度。当我们覆写 hashCode 方法时,可能会写出分布性不佳的 hashCode 方法,进而导致 hash 的冲突率比较高。通过移位和异或运算,可以让 hash 变得更复杂,进而影响 hash 的分布性。这也就是为什么 HashMap 不直接使用键对象原始 hash 的原因了。
遍历
和查找查找一样,遍历操作也是大家使用频率比较高的一个操作。对于 遍历 HashMap,我们一般都会用下面两种方式:
增强型for循环的底层原理就是迭代器,因此上面的代码相当于:
大家在遍历 HashMap 的过程中会发现,多次对 HashMap 进行遍历时,遍历结果顺序都是一致的。但这个顺序和插入的顺序一般都是不一致的。为什么呢,这里首先分析一下keySet的遍历:
如上面的源码,遍历所有的键时,首先要获取键集合KeySet对象,然后再通过 KeySet 的迭代器KeyIterator进行遍历。KeyIterator 类继承自HashIterator类,核心逻辑也封装在 HashIterator 类中。HashIterator 的逻辑并不复杂,在初始化时,HashIterator 先从桶数组中找到包含链表节点引用的桶。然后对这个桶指向的链表进行遍历。遍历完成后,再继续寻找下一个包含链表节点引用的桶,找到继续遍历。找不到,则结束遍历。举个例子,假设我们遍历下图的结构: 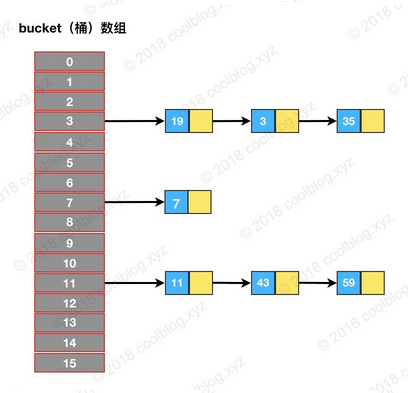
HashIterator 在初始化时,会先遍历桶数组,找到包含链表节点引用的桶,对应图中就是3号桶。随后由 nextNode 方法遍历该桶所指向的链表。遍历完3号桶后,nextNode 方法继续寻找下一个不为空的桶,对应图中的7号桶。之后流程和上面类似,直至遍历完最后一个桶。以上就是 HashIterator 的核心逻辑的流程,对应下图: 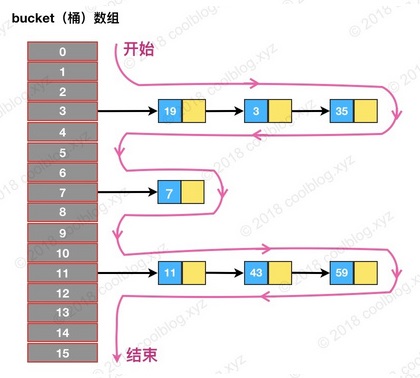
通过这段代码可以验证一下:
输出结果:
Key:
[7, 11, 43, 59, 19, 3, 35]
Key的哈希值对容量(16)取余:
[7, 11, 11, 11, 3, 3, 3]
在Map中的遍历结果:
[19, 3, 35, 7, 11, 43, 59]完全一致
插入
插入的大致流程其实是比较简单的:首先肯定是先定位要插入的键值对属于哪个桶,定位到桶后,再判断桶是否为空。如果为空,则将键值对存入即可。如果不为空,则需将键值对接在链表最后一个位置,或者更新键值对。
但是真正的插入流程非常复杂,因为掺杂了桶的扩容以及链表的树化等等。下面上源码:
大致流程如下:
- 当桶数组 table 为空时,通过扩容的方式初始化 table
- 查找要插入的键值对是否已经存在,存在的话根据条件判断是否用新值替换旧值
- 如果不存在,则将键值对链入链表中,并根据链表长度决定是否将链表转为红黑树
- 判断键值对数量是否大于阈值,大于的话则进行扩容操作
还是比较容易理解的。
扩容
在 Java 中,数组的长度是固定的,这意味着数组只能存储固定量的数据。但在开发的过程中,很多时候我们无法知道该建多大的数组合适。建小了不够用,建大了用不完,造成浪费。如果我们能实现一种变长的数组,并按需分配空间就好了。好在,我们不用自己实现变长数组,Java 集合框架已经实现了变长的数据结构。比如 ArrayList 和 HashMap。对于这类基于数组的变长数据结构,扩容是一个非常重要的操作。下面就来聊聊 HashMap 的扩容机制。
在详细分析之前,先来说一下扩容相关的背景知识:
在 HashMap 中,桶数组的长度均是2的幂,阈值大小为桶数组长度与负载因子的乘积。当 HashMap 中的键值对数量超过阈值时,进行扩容。
HashMap 的扩容机制与其他变长集合的套路不太一样,HashMap 按当前桶数组长度的2倍进行扩容,阈值也变为原来的2倍(如果计算过程中,阈值溢出归零,则按阈值公式重新计算)。扩容之后,要重新计算键值对的位置,并把它们移动到合适的位置上去。以上就是 HashMap 的扩容大致过程,接下来我们来看看具体的实现:
上面的源码总共做了3件事,分别是:
- 计算新桶数组的容量 newCap 和新阈值 newThr
- 根据计算出的 newCap 创建新的桶数组,桶数组 table 也是在这里进行初始化的
- 将键值对节点重新映射到新的桶数组里。如果节点是 TreeNode 类型,则需要拆分红黑树。如果是普通节点,则节点按原顺序进行分组。
上面列的三点中,创建新的桶数组就一行代码,不用说了。接下来,来说说第一点和第三点,先说说 newCap 和 newThr 计算过程。该计算过程对应 resize 源码的第一和第二个条件分支,如下:
通过这两个条件分支对不同情况进行判断,进而算出不同的容量值和阈值。它们所覆盖的情况如下:
| 条件 | 覆盖情况 | 备注 |
|---|---|---|
| oldCap > 0 | 桶数组 table 已经被初始化 | |
| oldThr > 0 | threshold > 0,且桶数组未被初始化 | 调用 HashMap(int) 和 HashMap(int, float) 构造方法时会产生这种情况,此种情况下 newCap = oldThr,newThr 在第二个条件分支中算出 |
| oldCap == 0 && oldThr == 0 | 桶数组未被初始化,且 threshold 为 0 | 调用 HashMap() 构造方法会产生这种情况。 |
这里把oldThr > 0情况单独拿出来说一下。在这种情况下,会将 oldThr 赋值给 newCap,等价于newCap = threshold = tableSizeFor(initialCapacity)。我们在初始化时传入的 initialCapacity 参数经过 threshold 中转最终赋值给了 newCap。这也就解答了前面提的一个疑问:initialCapacity 参数没有被保存下来,那么它怎么参与桶数组的初始化过程的呢?
嵌套分支:
| 条件 | 覆盖情况 | 备注 |
|---|---|---|
| oldCap >= 230 | 桶数组容量大于或等于最大桶容量 230 | 这种情况下不再扩容 |
| newCap < 2^30 && oldCap > 16 | 新桶数组容量小于最大值,且旧桶数组容量大于 16 | 该种情况下新阈值 newThr = oldThr << 1,移位可能会导致溢出 |
这里简单说明一下移位导致的溢出情况,当 loadFactor小数位为 0,整数位可被2整除且大于等于8时,在某次计算中就可能会导致 newThr 溢出归零。见下图:

分支二:
| 条件 | 覆盖情况 | 备注 | |
|---|---|---|---|
| newThr == 0 | 第一个条件分支未计算 newThr 或嵌套分支在计算过程中导致 newThr 溢出归零 |
说完 newCap 和 newThr 的计算过程,接下来再来分析一下键值对节点重新映射的过程。
在 JDK 1.8 中,重新映射节点需要考虑节点类型。对于树形节点,需先拆分红黑树再映射。对于链表类型节点,则需先对链表进行分组,然后再映射。需要的注意的是,分组后,组内节点相对位置保持不变。关于红黑树拆分的逻辑将会放在下一小节说明,先来看看链表是怎样进行分组映射的。
我们都知道往底层数据结构中插入节点时,一般都是先通过模运算计算桶位置,接着把节点放入桶中即可。事实上,我们可以把重新映射看做插入操作。在 JDK 1.7 中,也确实是这样做的。但在 JDK 1.8 中,则对这个过程进行了一定的优化,逻辑上要稍微复杂一些。在详细分析前,我们先来回顾一下 hash 求余的过程: 
上图中,桶数组大小 n = 16,hash1 与 hash2 不相等。但因为只有后4位参与求余,所以结果相等。当桶数组扩容后,n 由16变成了32,对上面的 hash 值重新进行映射: 
扩容后,参与模运算的位数由4位变为了5位。由于两个 hash 第5位的值是不一样,所以两个 hash 算出的结果也不一样。上面的计算过程并不难理解,继续往下分析。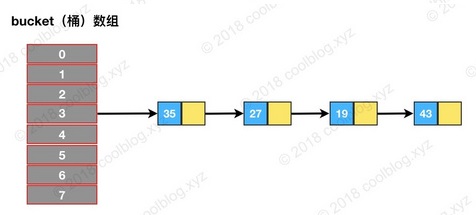
假设我们上图的桶数组进行扩容,扩容后容量 n = 16,重新映射过程如下:
依次遍历链表,并计算节点 hash & oldCap 的值。如下图所示 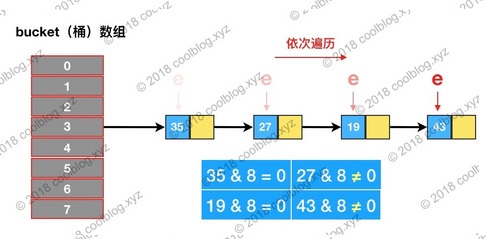
如果值为0,将 loHead 和 loTail 指向这个节点。如果后面还有节点 hash & oldCap 为0的话,则将节点链入 loHead 指向的链表中,并将 loTail 指向该节点。如果值为非0的话,则让 hiHead 和 hiTail 指向该节点。完成遍历后,可能会得到两条链表,此时就完成了链表分组: 
最后再将这两条链接存放到相应的桶中,完成扩容。如下图: 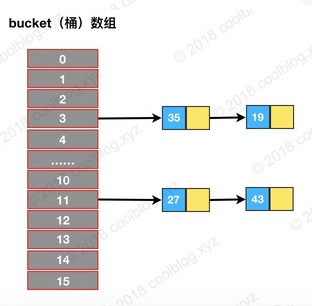
从上图可以发现,重新映射后,两条链表中的节点顺序并未发生变化,还是保持了扩容前的顺序。以上就是 JDK 1.8 中 HashMap 扩容的代码讲解。另外再补充一下,JDK 1.8 版本下 HashMap 扩容效率要高于之前版本。如果大家看过 JDK 1.7 的源码会发现,JDK 1.7 为了防止因 hash 碰撞引发的拒绝服务攻击,在计算 hash 过程中引入随机种子。以增强 hash 的随机性,使得键值对均匀分布在桶数组中。在扩容过程中,相关方法会根据容量判断是否需要生成新的随机种子,并重新计算所有节点的 hash。而在 JDK 1.8 中,则通过引入红黑树替代了该种方式。从而避免了多次计算 hash 的操作,提高了扩容效率。
删除
HashMap 的删除操作并不复杂,仅需三个步骤即可完成。第一步是定位桶位置,第二步遍历链表并找到键值相等的节点,第三步删除节点。相关源码如下:
上面的代码并不复杂,不难理解,这里就不多说了。
table变量
如果大家细心阅读 HashMap 的源码,会发现桶数组 table 被申明为 transient。transient 表示易变的意思,在 Java 中,被该关键字修饰的变量不会被默认的序列化机制序列化。我们再回到源码中,考虑一个问题:桶数组 table 是 HashMap 底层重要的数据结构,不序列化的话,别人还怎么还原呢?
这里简单说明一下吧,HashMap 并没有使用默认的序列化机制,而是通过实现readObject/writeObject两个方法自定义了序列化的内容。这样做是有原因的,试问一句,HashMap 中存储的内容是什么?不用说,大家也知道是键值对。所以只要我们把键值对序列化了,我们就可以根据键值对数据重建 HashMap。有的朋友可能会想,序列化 table 不是可以一步到位,后面直接还原不就行了吗?这样一想,倒也是合理。但序列化 talbe 存在着两个问题:
- table 多数情况下是无法被存满的,序列化未使用的部分,浪费空间
- 同一个键值对在不同 JVM 下,所处的桶位置可能是不同的,在不同的 JVM 下反序列化 table 可能会发生错误。
以上两个问题中,第一个问题比较好理解,第二个问题解释一下。HashMap 的get/put/remove等方法第一步就是根据 hash 找到键所在的桶位置,但如果键没有覆写 hashCode 方法,计算 hash 时最终调用 Object 中的 hashCode 方法。但 Object 中的 hashCode 方法是 native 型的,不同的 JVM 下,可能会有不同的实现,产生的 hash 可能也是不一样的。也就是说同一个键在不同平台下可能会产生不同的 hash,此时再对在同一个 table 继续操作,就会出现问题。
综上所述,大家应该能明白 HashMap 不序列化 table 的原因了
直接阅读源码还是有些难度的,结合这篇博客勉强把源码读完了,感觉源代码写的好厉害(* ̄3 ̄)╭
